
I recently obtained my PhD from the University of Southern California where I worked with Prof. Laurent Itti. My PhD thesis falls at the intersection of Machine Learning, Computer Vision and Robotics. You can find my Resume, CV, Research and Bio.
My PhD thesis is on Transferrable Pretrained models for Visual Navigation that are trained using large datasets of unlabeled videos. Along with this I’m also interested in 3D Generative models that allow us to build effective Simulators from Real-world data.
Along with the above research areas, I’m also interested in engineering pipelines for efficient training and inference for ML models. I’m also a full-stack roboticist and worked on building and deploying models onto hardware platforms. We recently built a large-scale mobile-robot for our experiments. Please visit the Beobotv3 project for more details.
During my undergraduate studies, I worked on Autonomous Visual Navigation for Quadcopter as part of my Hons. Project. I implemented state-estimation modules, primarily using sensor fusion for visual-inertial SLAM methods.
Research
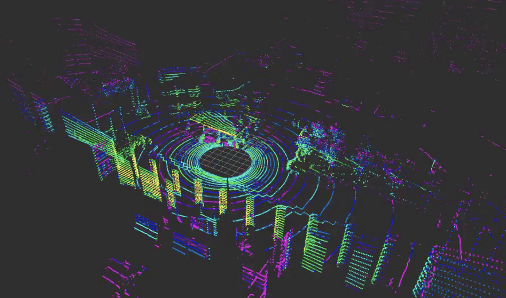
USCILab3D Dataset: A Large-scale, Long-term, Semantic, Outdoor 3D Dataset
Kiran Lekkala*, Henghui Bao*, Piexu Cai, Kevin Lim, Chen Liu, Laurent Itti,
Published at Neural Information Processing Systems (NeurIPS), December, 2024
We propose a novel pipeline that uses foundational models to annotate 3D pointclouds. We also release a 3D dataset, consisting of images and pointclouds, that is collected over the span of an year on a large campus-scale environment.
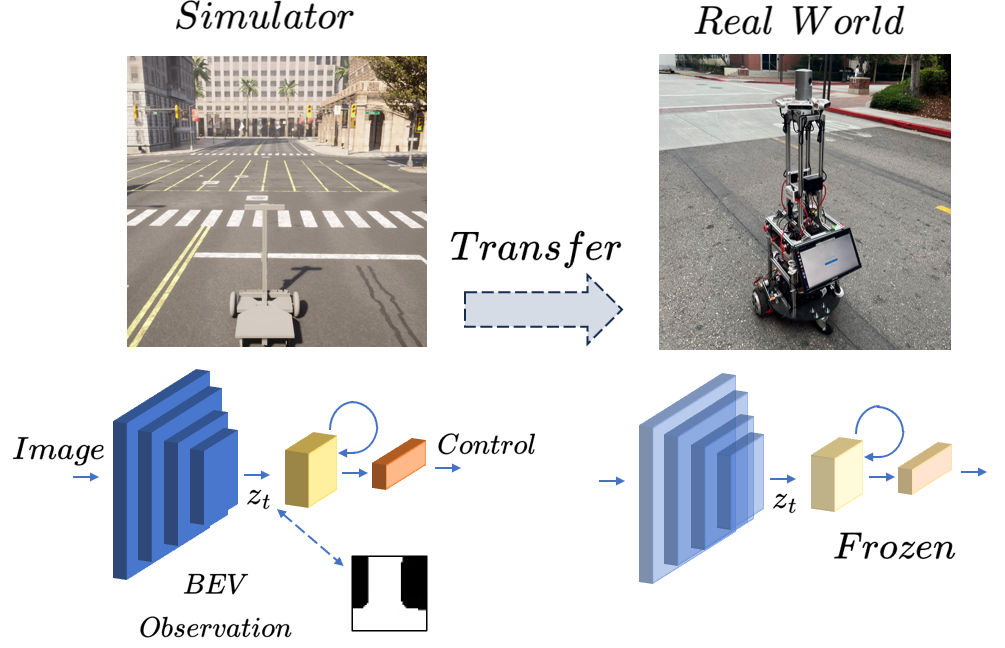
Bird’s Eye View Based Pretrained World model for Visual Navigation
Kiran Lekkala, Chen Liu, Laurent Itti
Published at International Symposium on Robotics Research (ISRR), December, 2024; Also presented at NeurIPS 2023 Robot Learning Workshop.
We propose a robust system that integrates a control policy, trained within a simulator, with an internal LSTM-based robustness-enhanced world model and an external visual perception model, facilitating seamless application of the policy in real-world scenarios.

Real-world Visual Navigation in a Simulator using Scene Generation
Henghui Bao*, Kiran Lekkala*, Laurent Itti
Presented at CVPR Workshop on Robotics and Autonomous Driving, June, 2024.
We design a data-driven simulator for outdoor navigation that employs Gaussian Splatting for rendering, and uses a graph based engine to query appropriate splat file during simulation.

Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Abby O’Neill, ..., Kiran Lekkala, ..., Zipeng Lin [192 additional authors; All authors listed alphabetically],
Published at International Conference on Robotics and Automation (ICRA), May, 2024.
We introduce the Open X-Embodiment Dataset, the largest robot learning dataset to date with 1M+ real robot trajectories, spanning 22 robot embodiments. We train large, transformer-based policies on the dataset (RT-1-X, RT-2-X) and show that co-training with our diverse dataset substantially improves performance.
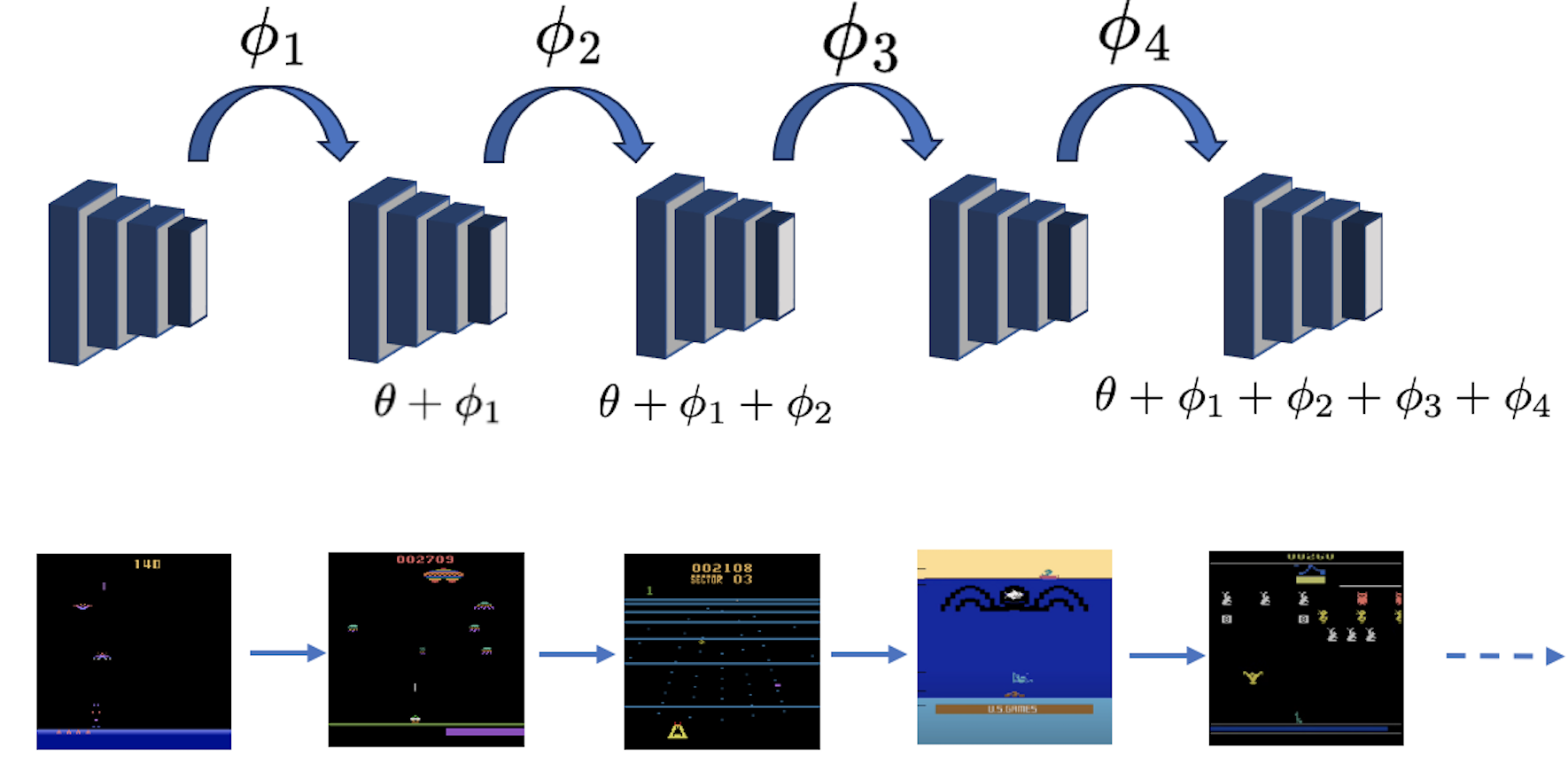
Evaluating Pretrained models for Deployable Lifelong Learning
Kiran Lekkala*, Eshan Bhargava*, Laurent Itti
Published in the proceedings of Winter Conference on Applications of Computer Vision (WACV) Workshop on Pretraining, January, 2024.
We implement our novel Scalable Lifelong Learning system that is capable of retaining knowledge from the previously learnt RL tasks. We also create a novel benchmark for evaluating a Deployable Lifelong Learning system for Visual Reinforcement Learning (RL) that is pretrained on our curated dataset.
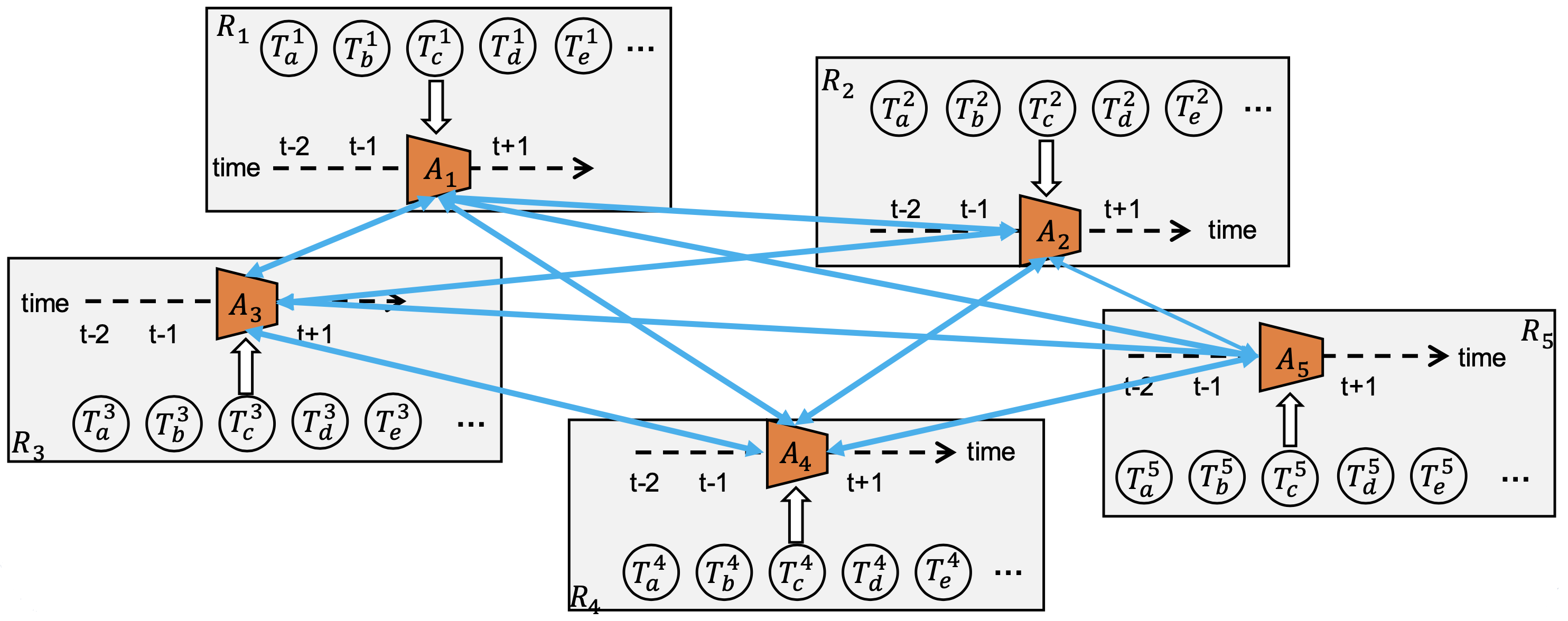
Lightweight Learner for Shared Knowledge Lifelong Learning
Yunhao Ge, Yuecheng Li, Di Wu, Ao Xu, Adam M. Jones, Amanda Sofie Rios, Iordanis Fostiropoulos, Shixian Wen, Po-Hsuan Huang, Zachary William Murdock, Gozde Sahin, Shuo Ni, Kiran Lekkala, Sumedh Anand Sontakke, Laurent Itti
Published in Transactions on Machine Learning Research, May, 2023; Also Presented at ICML LLW 2023.
We propose a new Shared Knowledge Lifelong Learning (SKILL) challenge, which deploys a decentralized population of LL agents that each sequentially learn different tasks, with all agents operating independently and in parallel.
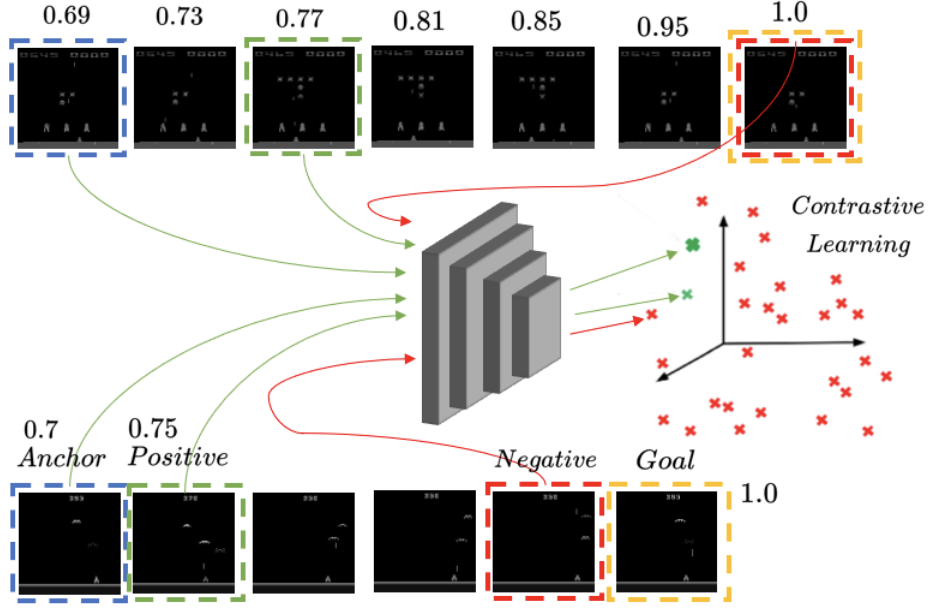
Value Explicit Pretraining for Goal-Based Transfer Learning
Kiran Lekkala, Henghui Bao, Sumedh Sontakke, Erdem Biyik, Laurent Itti
Spotlight presentation at Conference on Robot Learning (CoRL) Pretraining for Robot Learning, November, 2023; Under review at Robotics and Automation Letters (RA-L).
A novel method that allows for learning Task-agnostic representations based on a Contrastive loss that uses value function estimates obtained using a sequence of observations.
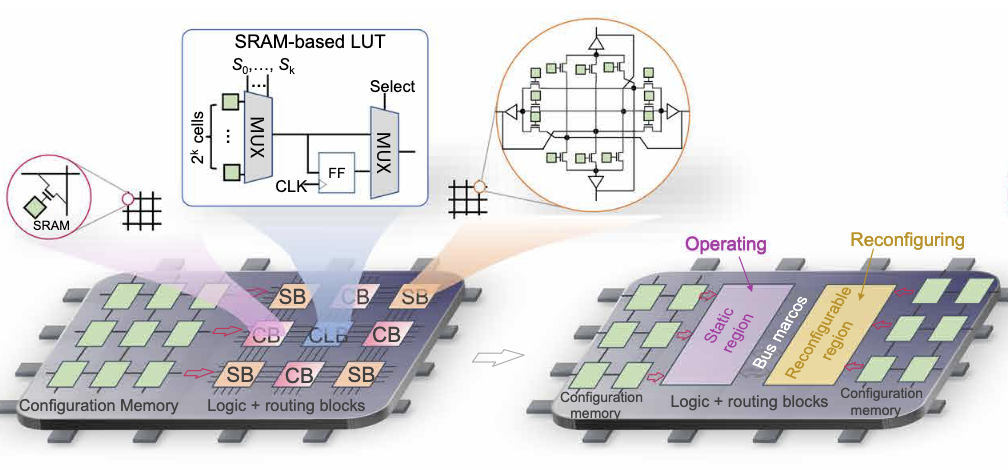
Ferroelectric FET based Context-Switching FPGA Enabling Dynamic Reconfiguration for Adaptive Deep Learning Machines.
Yixin Xu, Zijian Zhao, Yi Xiao, Tongguang Yu, Halid Mulaosmanovic, Dominik Kleimaier, Stefan Duenkel, Sven Beyer, Xiao Gong, Rajiv Joshi, X Sharon Hu, Shixian Wen, Amanda Sofie Rios, Kiran Lekkala, Laurent Itti, Eric Homan, Sumitha George, Vijaykrishnan Narayanan, Kai Ni
Published in Science Advances, January, 2024, Volume 10, Issue 3
We propose a novel ML system for computer vision related tasks that improves task performance, along with keeping the model parameters lower than the baseline approaches.
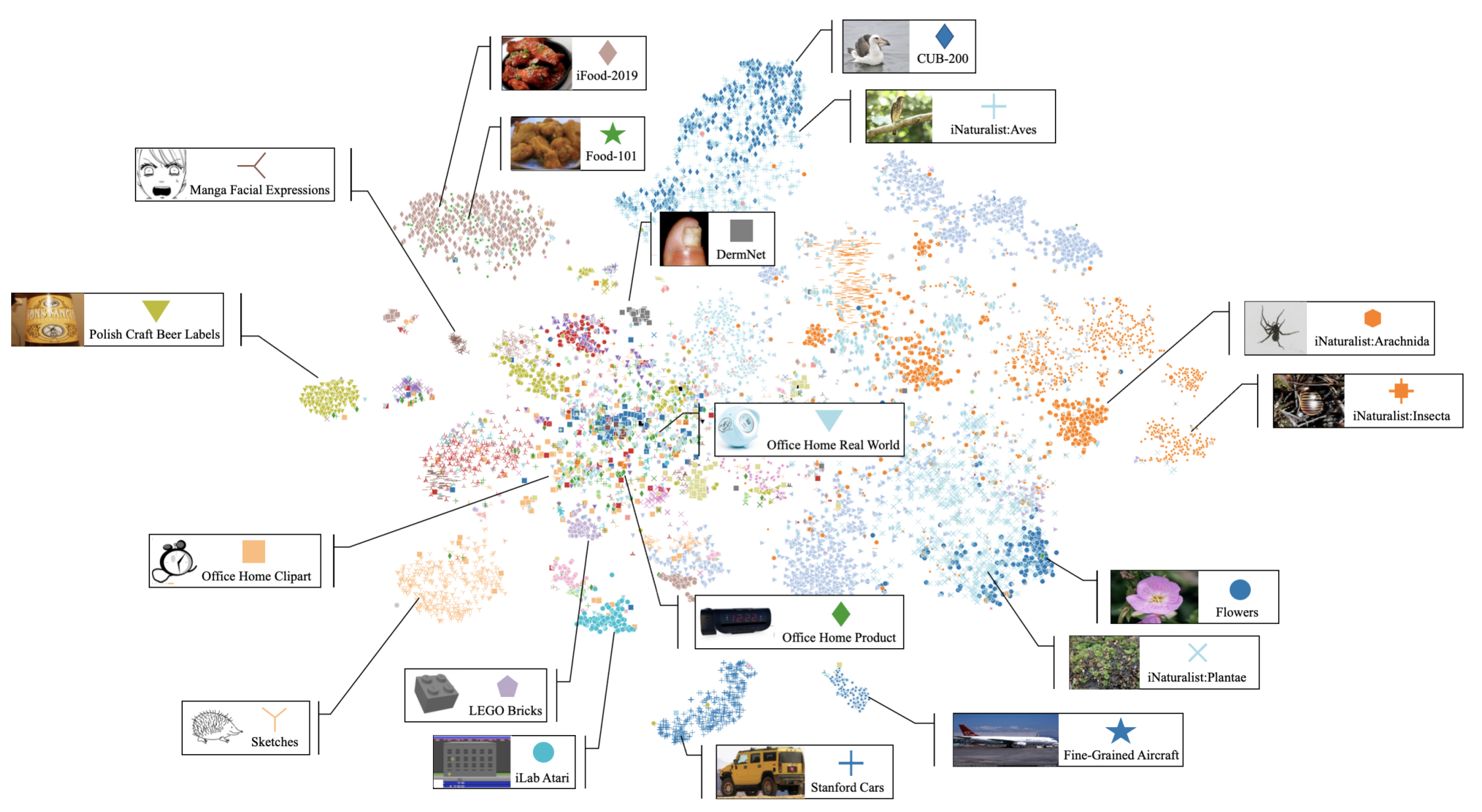
USC-DCT: A Collection of Diverse Classification Tasks
Adam M Jones, Gozde Sahin, Zachary W Murdock, Yunhao Ge, Ao Xu, Yuecheng Li, Di Wu, Shuo Ni, Po-Hsuan Huang, Kiran Lekkala, Laurent Itti
Published in MDPI Data, September 2023, Volume 8, Issue 10
This paper provides a methodology for processing and cleaning datasets that can be applied to existing or new classification tasks as well as implements these practices in a collection of diverse classification tasks called USC-DCT. Constructed using 107 classification tasks collected from the internet, this collection provides a transparent and standardized pipeline that can be useful for many different applications and frameworks.
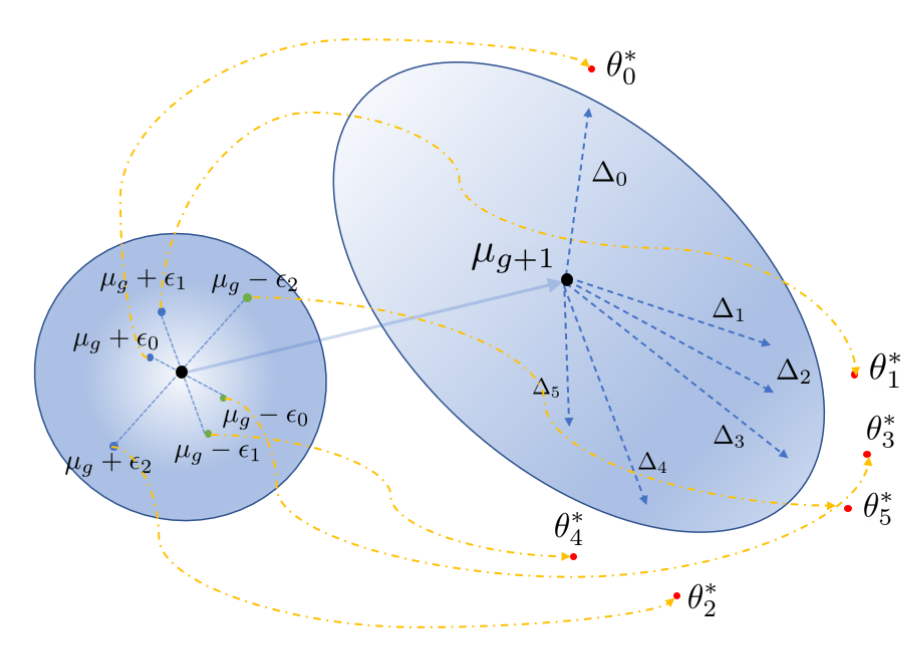
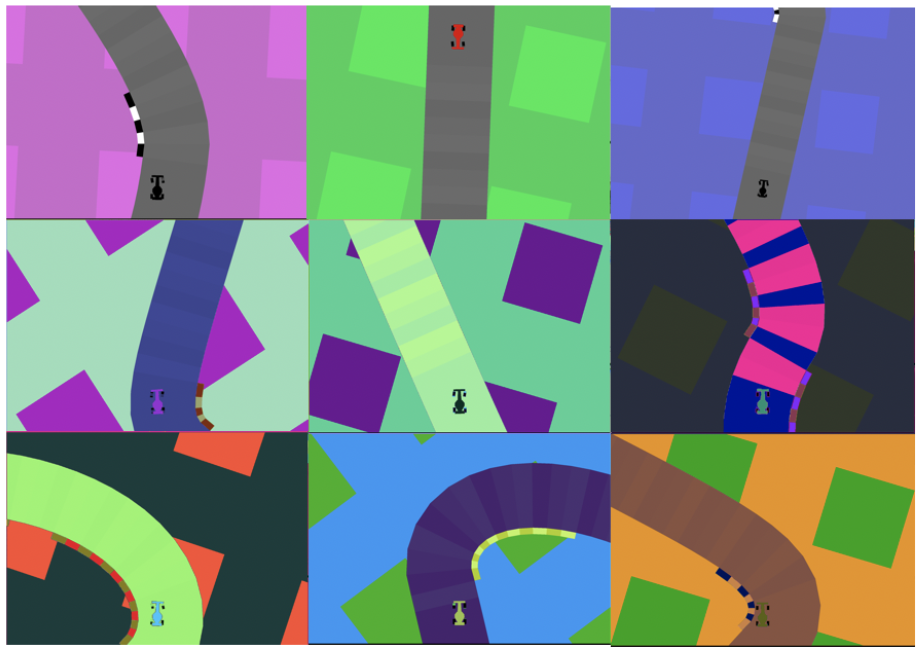
Shaped Policy search for Evolutionary strategies using waypoints
Kiran Lekkala, Laurent Itti
Published at International Conference on Robotics and Automation (ICRA), May, 2021
In this paper, we try to improve exploration in Blackbox methods, particularly Evolution strategies (ES), when applied to Reinforcement Learning (RL) problems where intermediate waypoints/subgoals are available.
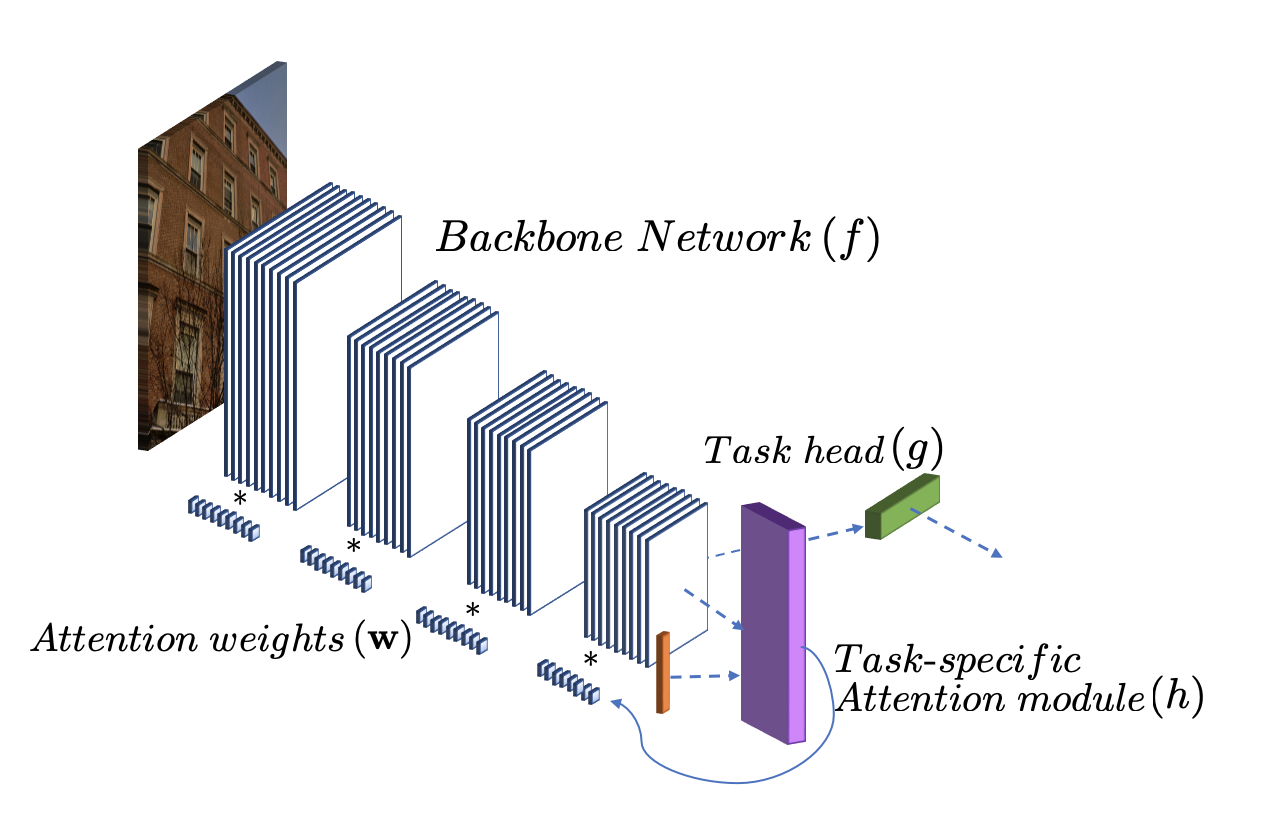
Attentive Feature Reuse for Multi Task Meta learning
Kiran Lekkala, Laurent Itti
Oral presentation at International Conference on Learning Representations Embodied Multimodal Learning workshop, May, 2021;
We develop new algorithms for simultaneous learning of multiple tasks, and for adapting to unseen task/domain distributions within those high-level tasks.
Meta adaptation using Importance weighted Demonstrations
Kiran Lekkala, Sami Abu-El-Haija, Laurent Itti
Arxiv Preprint, November, 2019
We propose a novel algorithm to generalize on any related task by leveraging prior knowledge on a set of specific tasks, which involves assigning importance weights to each past demonstration
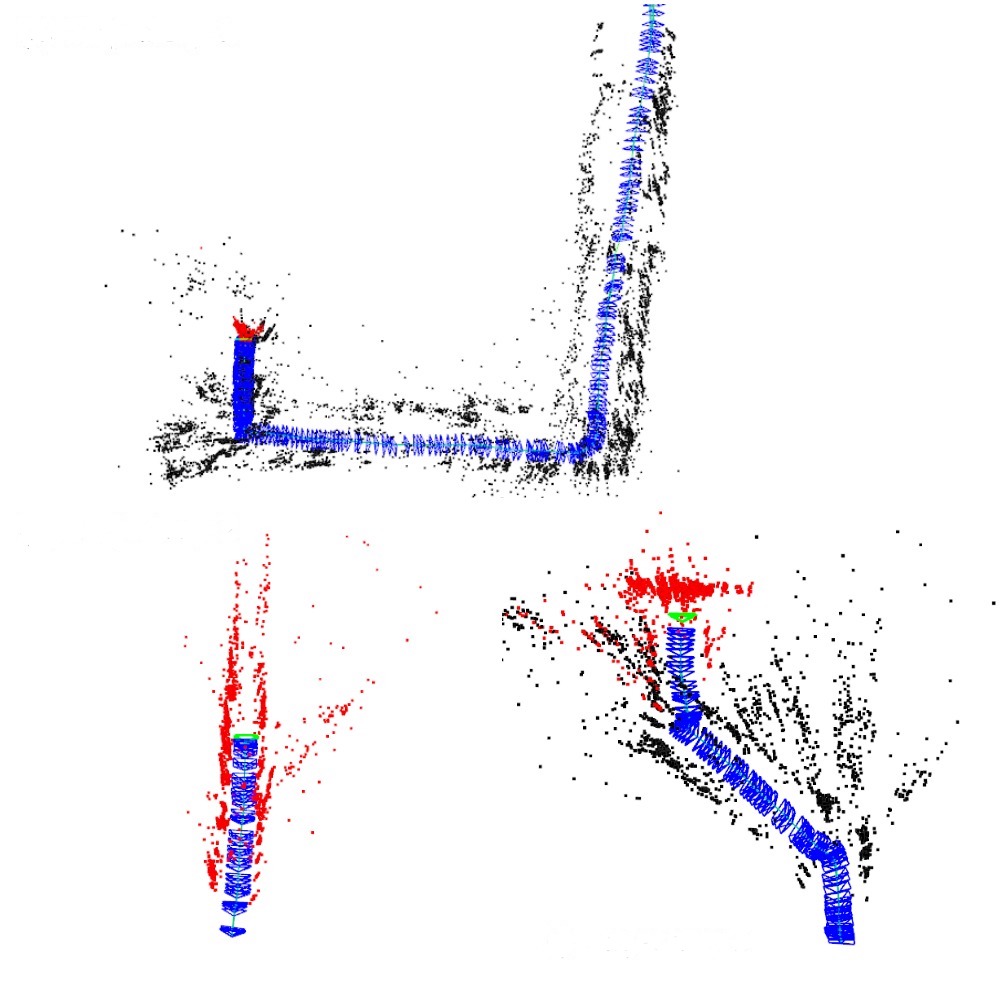
Accurate and Augmented Navigation for Quadrocopter based on Multi-Sensor Fusion
Kiran Lekkala, VK Mittal
Published at INDICON, December, 2016.
We propose a robust system that integrates a control policy, trained within a simulator, with an internal LSTM-based robustness-enhanced world model and an external visual perception model, facilitating seamless application of the policy in real-world scenarios.

Simultaneous Aerial Vehicle Localization and Human Tracking
Kiran Lekkala, VK Mittal
Published at TENCON, November, 2016
We propose a robust system that integrates a control policy, trained within a simulator, with an internal LSTM-based robustness-enhanced world model and an external visual perception model, facilitating seamless application of the policy in real-world scenarios.
Notable projects

Paragraph Segmentation from Audio Transcripts using LLM based Semantic Grounding
We develop a method that allows for segmenting semantically conistant paragraphs from diaterization tool like whisper
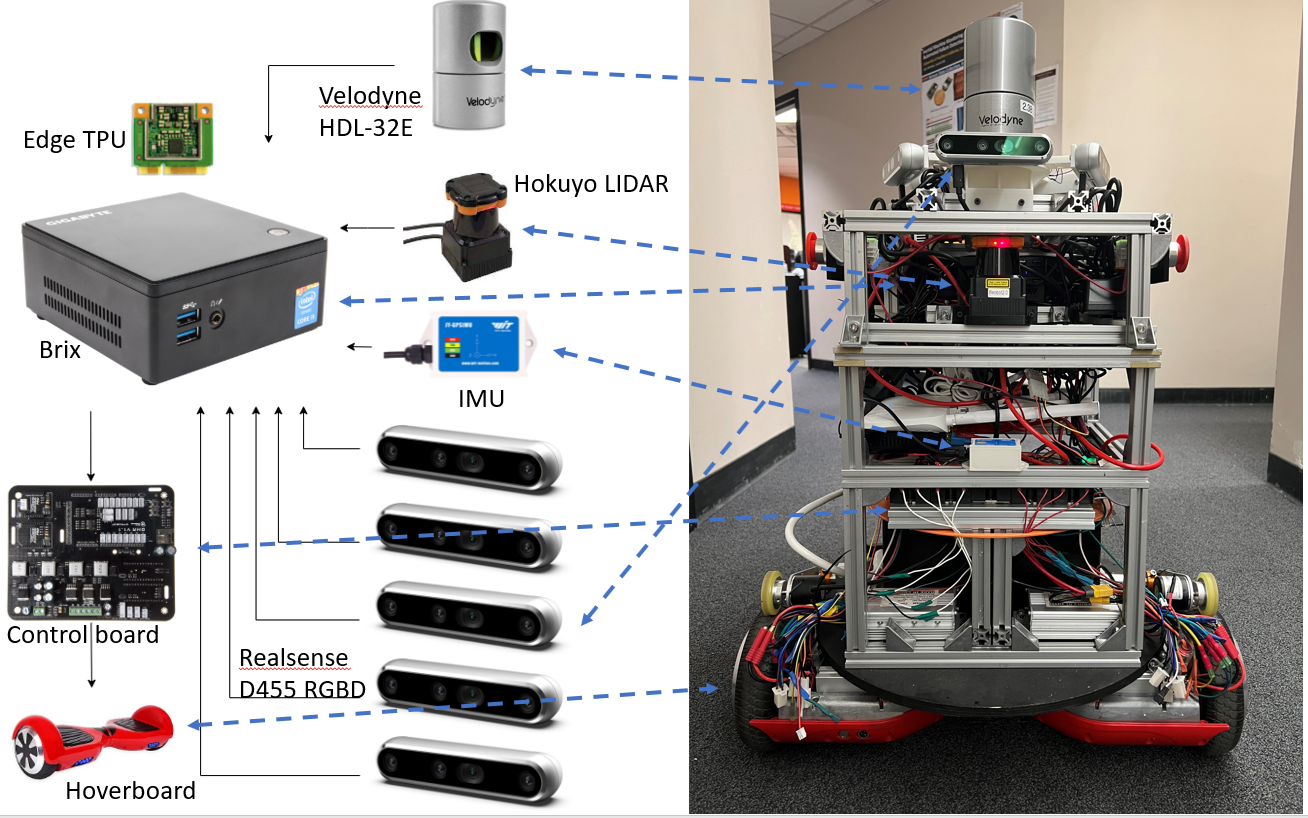
Low Cost Autonomous Mapping system for 3D-LLM based Scene Understanding
Virtual campus system for USC that is based on 3D-LLMs and answers queries that users input. The system also uses Gaussian splats for rendering realistic visuals on the campus environment.
Teaching

CSCI 561: Foundations of Artificial Intelligence

CSCI 570: Analysis of Algorithms
I borrowed this website from this amazing repository.